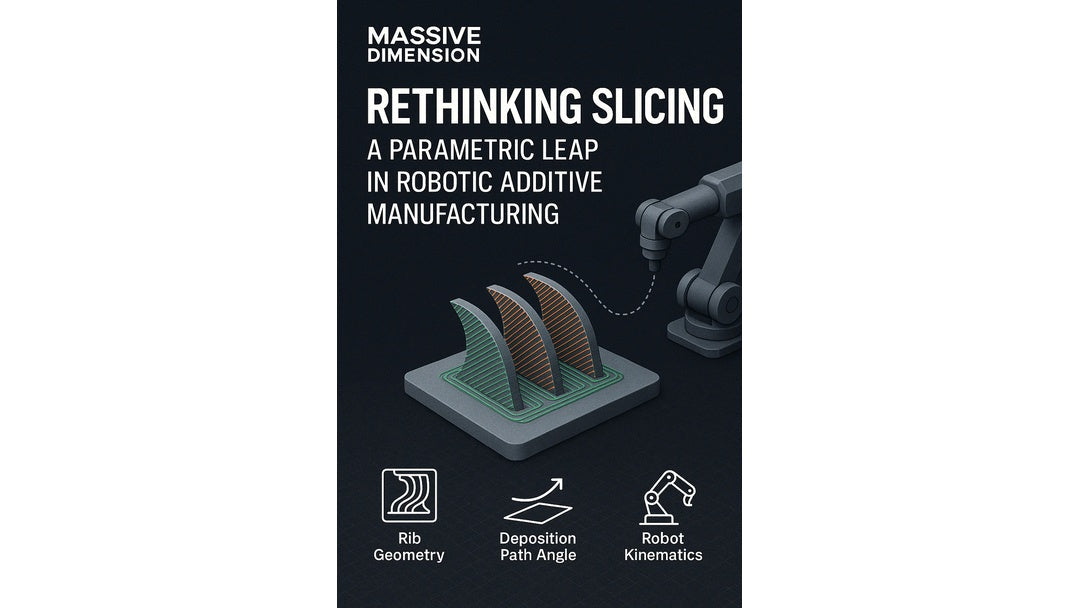





Rethinking Slicing: A Parametric Leap in Robotic Additive Manufacturing
In the fast-evolving landscape of large-format additive manufacturing, breakthroughs often come from rethinking long-established processes. A recent research study, A Novel Parametrical Approach to the Ribbed Element Slicing Process in Robotic Additive Manufacturing by Buj-Corral et al. (2024), offers exactly that—a fresh, parametrically driven take on slicing strategies that could open new frontiers for robotic 3D printing.
Beyond Conventional Slicing
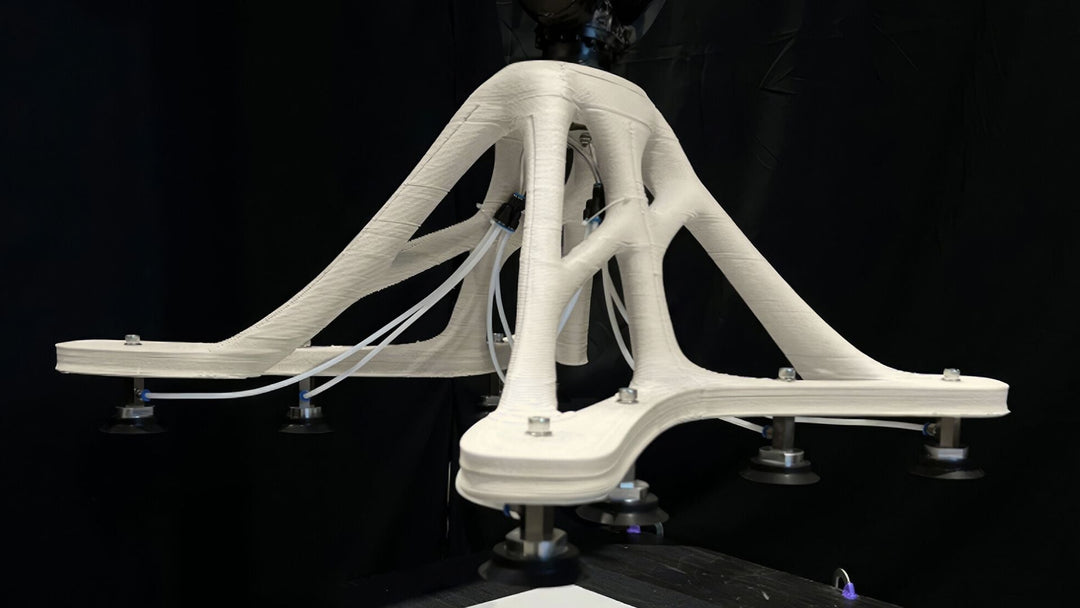
Traditional slicing algorithms are designed for flat, horizontal layers. While this works for most Cartesian 3D printers, it's limiting for robotic systems that operate with more degrees of freedom and non-planar capabilities—like those developed by Massive Dimension. The paper identifies this constraint and proposes a robust parametrical model for slicing ribbed elements, which are common in lightweight structural components.
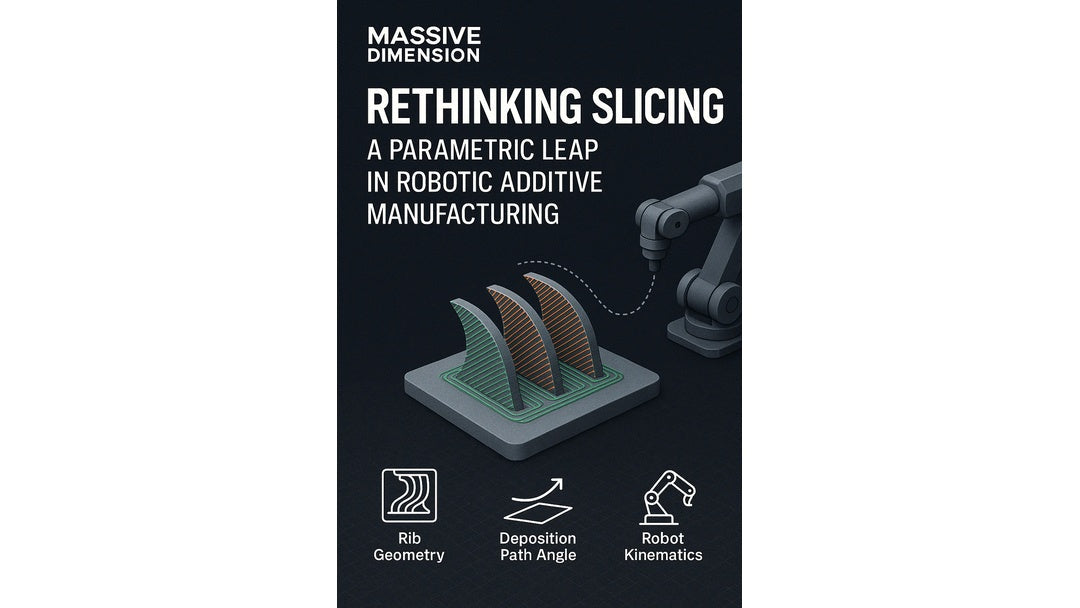
Their slicing method adjusts based on three key parameters:
-
Rib geometry and orientation
-
Deposition path angle
-
Robot kinematics
This enables generation of more efficient, structurally intelligent toolpaths that leverage the capabilities of robotic arms, especially for complex topologies.
Why It Matters to Massive Dimension
At Massive Dimension, we’ve long believed that toolpath logic must evolve alongside hardware. Our robotic cells, powered by high-output extruders and open software ecosystems, are designed to push the boundaries of what’s possible in large-scale printing. This study validates the trajectory we’ve been pursuing—and suggests new optimization opportunities in our slicing workflows.
Key takeaways relevant to MD’s applications:
-
Improved Surface Quality: By adjusting slicing based on rib geometry, the process reduces unsupported overhangs and improves layer adhesion.
-
Structural Efficiency: Slicing that aligns with rib orientation can significantly enhance part strength and reduce print time.
-
Kinematic Awareness: Integrating robot arm constraints into slicing ensures that the paths are not only efficient but physically possible—a critical factor in 6-DOF robotic printing.
Implementation Potential
The authors implemented their method in MATLAB, and while it's in a research phase, it opens the door to modular, parametric slicing plugins for open platforms like Grasshopper, Rhino, or custom G-code generators used by many of our partners. Future development could see this integrated into our own print preparation tools or deployed in collaborative customer workflows.
Massive Dimension is actively exploring slicing paradigms beyond flat layers. This research offers a path forward—not just for better prints, but for truly intelligent print planning.
Closing Thoughts
This study is more than academic—it’s a signpost toward smarter robotic additive manufacturing. As the industry matures, slicing must become as adaptable as the robots themselves. We’re excited to engage with research like this and bring its insights into our development roadmap.
Citation:
Buj-Corral, I., Clavería-Crespo, J. A., & Cano-Raya, C. (2024). A Novel Parametrical Approach to the Ribbed Element Slicing Process in Robotic Additive Manufacturing. Retrieved from ResearchGate